In this project we aim to evolve the morphology and control for modular robot structures to traverse different and complex environments. Modular reconfigurable robots are a special class of robots built from basic units that can reconfigure themselves to perform different tasks [Jantapremjit and Austin, 2001].
Using simple homogenous modules that can be easily implemented different snake-like structures are built. A hybrid controller inspired on Central Pattern generators and Hormone messages is used as a local controller for each module. Coordinated movement is achieved by the interaction of all controllers with their neighbors. Right now we are working on integrating the information coming from sensors in the robot to the controllers to help it adapt and on transferring the evolved controllers to a hardware prototype.
The code used in the Evostar 2015 paper can be found here.
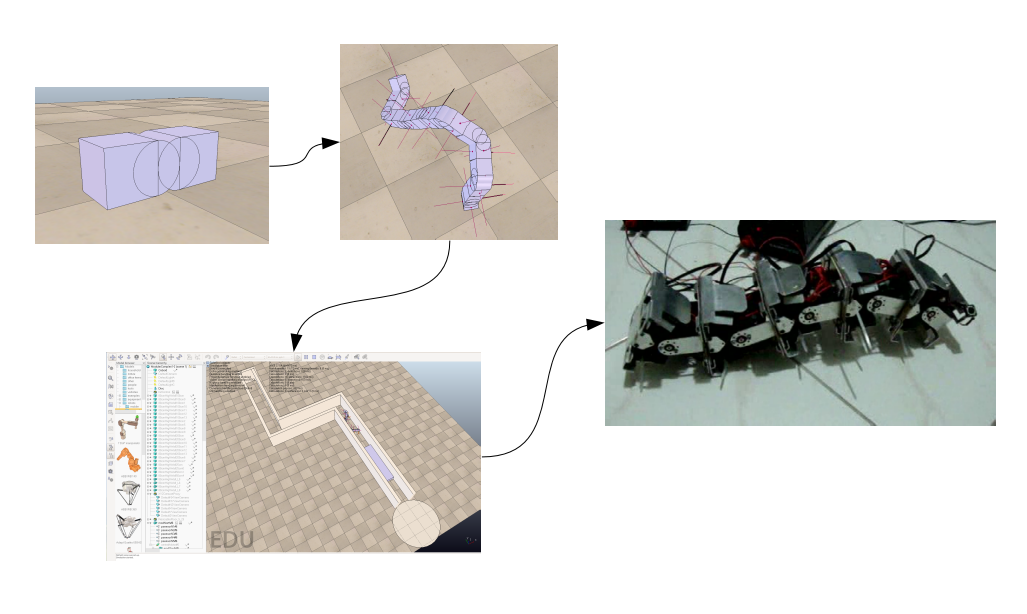
And we are developing new robotic modules, see our first tests: